






渲染一个精细到头发和皮肤褶皱的龙珠3D手办,有多复杂?

对于经典模型NeRF来说,至少需要同一个相机从特定距离拍摄的100张手办照片。
这些照片的拍摄角度、远近和亮暗都没有要求,还原出来的图片却能做到清晰无伪影:

甚至还能预估材质,并从任意角度重新打光:
这个AI模型名叫NeROIC,是南加州大学和Snap团队玩出来的新花样。
有网友见状狂喜:
不同角度的照片就能渲染3D模型,快进到只用照片来拍电影……
还有网友借机炒了波NFT(手动狗头)
基于NeRF改进,可预测材料光照
介绍这个模型之前,需要先简单回顾一下NeRF。
NeRF提出了一种名叫神经辐射场(neuralradiancefield)的方法,利用5D向量函数来表示连续场景,其中5个参数分别用来表示空间点的坐标位置(x,y,z)和视角方向(θ,φ)。
然而,NeRF却存在一些问题:
对输入图片的要求较高,必须是同一场景下拍摄的物体照片;无法预测物体的材料属性,因此无法改变渲染的光照条件。这次的NeROIC,就针对这两方面进行了优化:
输入图片的场景不限,可以是物体的任意背景照片,甚至是网络图片;可以预测材料属性,在渲染时可以改变物体表面光照效果(可以打光)。它主要由2个网络构成,包括深度提取网络(a)和渲染网络(c)。
首先是深度提取网络,用于提取物体的各种参数。
为了做到输入场景不限,需要先让AI学会从不同背景中抠图,但由于AI对相机的位置估计得不准确,抠出来的图片总是存在下面这样的伪影(图左):

因此,深度提取网络引入了相机参数,让AI学习如何估计相机的位置,也就是估算图片中的网友是从哪个角度拍摄、距离有多远,抠出来的图片接近真实效果(GT):

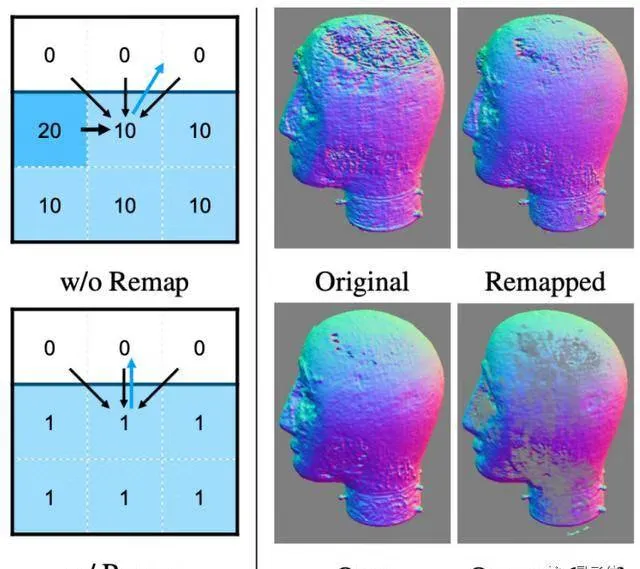
同时,设计了一种估计物体表面法线的新算法,在保留关键细节的同时,也消除了几何噪声的影响(法线即模型表面的纹路,随光线条件变化发生变化,从而影响光照渲染效果):
最后是渲染网络,用提取的参数来渲染出3D物体的效果。
具体来说,论文提出了一种将颜色预测、神经网络与参数模型结合的方法,用于计算颜色、预测最终法线等。
其中,NeROIC的实现框架用PyTorch搭建,训练时用了4张英伟达的TeslaV100显卡。
训练时,深度提取网络需要跑6~13小时,渲染网络则跑2~4小时。
用网络图片就能渲染3D模型
至于训练NeROIC采用的数据集,则主要有三部分:
那么,这样的模型效果究竟如何呢?
论文先是将NeROIC与NeRF进行了对比。
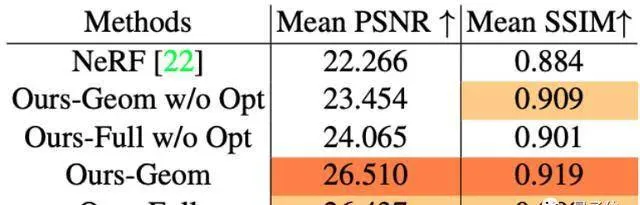
从直观效果来看,无论是物体渲染细节还是清晰度,NeROIC都要比NeRF更好。
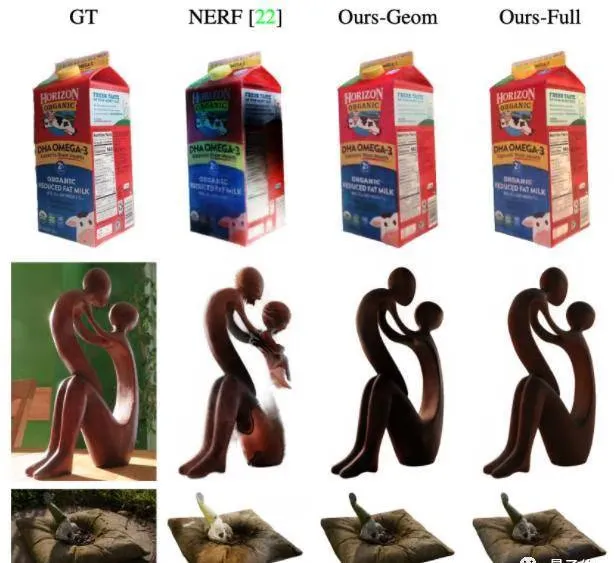
具体到峰值信噪比(PSNR)和结构相似性(SSIM)来看,深度提取网络的“抠图”技术都挺不错,相较NeRF做得更好:

还能产生新角度,而且重新打光的效果也不错,例如这是在室外场景:
室内场景的打光又是另一种效果:
结果显示,即使是数据集不足的情况下,NeROIC的效果依旧比NeRF更好。
对AI来说,重建透明或半透明物体确实也确实是比较复杂的任务,可以等代码出来后尝试一下效果。
一作清华校友

论文一作匡正非,目前在南加州大学(UniversityofSouthernCalifornia)读博,导师是计算机图形学领域知名华人教授黎颢。
他本科毕业于清华计算机系,曾经在胡事民教授的计图团队中担任助理研究员。

—完—

